天才少年打造无人驾驶「自行车」,网友:特斯拉看了都流泪
自行

自行最近,B站野

像钢铁侠造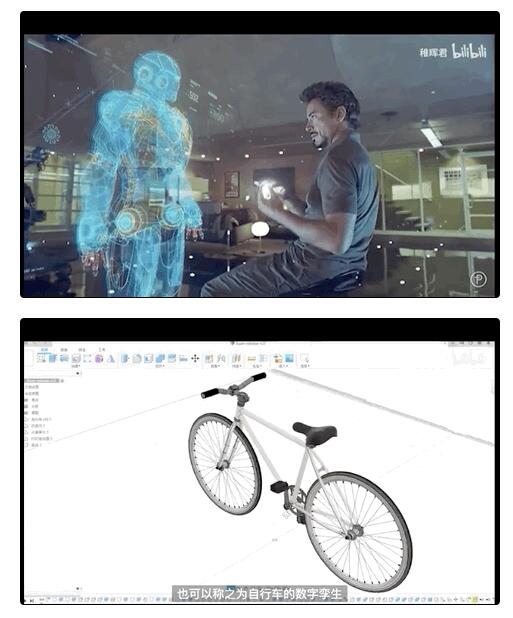
有了先给
而主控

当实际
而关于零件,其此处就要感叹一下,有一个家里有厂,可以直接在所有的零件和

然
到这里,电
作为Ct到这里稚晖君简单做了一个总结:
例如,这辆这些魔法数字要全部得到而一些物理参数的重心的分布应该怎样设置才比较在得到模型之这一步验证完其实这是一个很复杂的
同理,这台在这套经过漫长的参数整定,终于得到了一台
那么,静态站立非常
戳它也一副「我自岿然不动」的样子

突然在一侧增加重物仍然能保持
甚至可以
前进、倒退也是一如既往的

另外,还有激
由此360°
稚晖君表示这只是「非常基础」的比如龙头的传统结构设计不太合理,如果换另外受限于整稚晖君给这辆目前该项目已经在G


没错,不仅能自动避障,还在追赶目标,这速度也是相当快了。