全球首个通用具身大模型正式亮相,推动具身智能落地应用
一键部署 OpenClaw
近年,机器人技术在真实复杂环境中的应用逐步进入新的阶段。AWE 3.0 的发布标志着具身智能领域的重大突破,其在工业精密操作方面的潜力也得以体现,成为推动行业发展的重要里程碑。
据介绍,AWE 3.0 是一种具身大模型,具备强大赋能能力。通过 SenseHub 发布会正式揭幕;石智航的首席科学家丁文超博士在会议上详细阐述了该技术的核心优势及应用前景。AWE 3.0 的问世,预示具身智能在实际场景中的落地与广泛应用。

AWE 3.0 的五大能力升级,打造“有价值”的大模型
此次发布为具身大模型的发展注入新动力。其目标在于实现“走出温室、落地干活”,通过毫米级的精准操作与柔性物体感知控制,促进在复杂环境中的实用化进程。
发布现场展示了在多任务执行、稳定性与环境适应性等方面的卓越能力,尤其在跨场景迁移与性能提升方面取得显著突破。

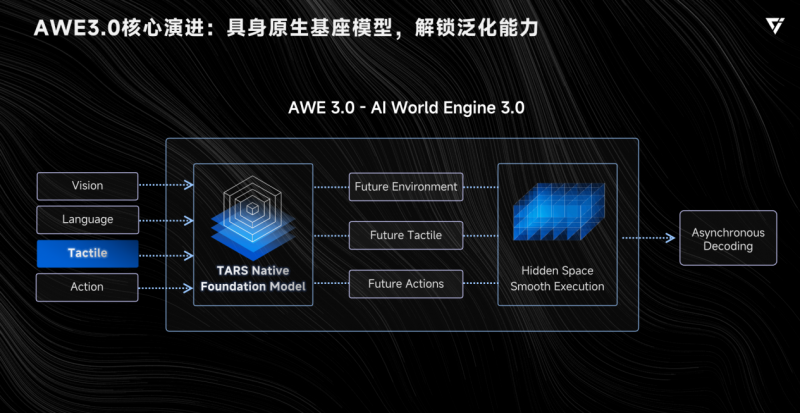
AWE 3.0 兼具前沿技术与成熟能力,延续端到端学习的优势,同时通过自研的全视角感知策略,提升在未见角度下的任务成功率,增强在真实环境中的应对能力。
该技术为复杂真实环境中的机器人提供了可靠解决方案,支撑产业的稳定运行与高效执行。
全视角感知策略:从容应对变化
传统机器人往往受限于固定视角,而全视角感知策略使其在动态环境中也能保持稳定执行能力。
实验数据显示,此策略显著提升了在未见视角下的任务执行性能,增强了在真实场景中应对复杂情况的能力。
高密度触觉感知 HTS:感知入微,触达毫厘
在高精度接触与柔性操作方面,触觉感知技术至关重要。AWE 3.0 基于丰富数据积累,开发出高密度触觉感知技术 HTS,显著提升抓取、装配与清洁等操作的精确度。

隐空间丝滑动作 LAS:行云流水,精细如丝
针对机器人执行过程中的抖动与卡顿问题,AWE 3.0 通过隐空间丝滑动作技术,显著提升动作执行的流畅性与稳定性,支持更长程任务的顺利完成。

此外,SenseHub 的推出解决了多源异构数据的同步问题,确保数据处理的高效与准确,为实际应用中的表现提供了强有力保障。
从技术到应用,AWE 3.0 的全维度能力升级推动智能制造与服务的落地,开启具身智能大脑的规模化应用时代。
“吉尼斯世界纪录只是起点,更重要的是让机器人帮助世界突破更多能力边界。”